





第32回CATTOMフォーラム
Wed May 18 10:59:32 JST 2016 (modified: Sun Oct 1 10:50:27 JST 2017)
views: 2982, keywords: この記事は最終更新日が8年以上前のものです。
移動ロボットの ナビゲーション技術
千葉工業大学 上田隆一
本日の内容
- 自身の背景
- 研究室
- 移動ロボットのアルゴリズム
- 自身の研究
自身の背景
ソフトウェアでロボットを動かす人
上田研究室
- 15名
- B3: 13名、B4: 2名
- 「自律ロボット研究室」
- ロボットの状態認識・行動決定を研究
- 機械学習も道具として少し扱う
- RoboCup@Home
- 学科で連携。上田研の貢献はまだまだ
最近の活動
3年の皆さんは使う道具(ハード/ソフト)の評価中
「トイプードル」だそうです。
移動ロボットの ナビゲーション
- ナビゲーション: 航海術
- その昔、課題となったこと
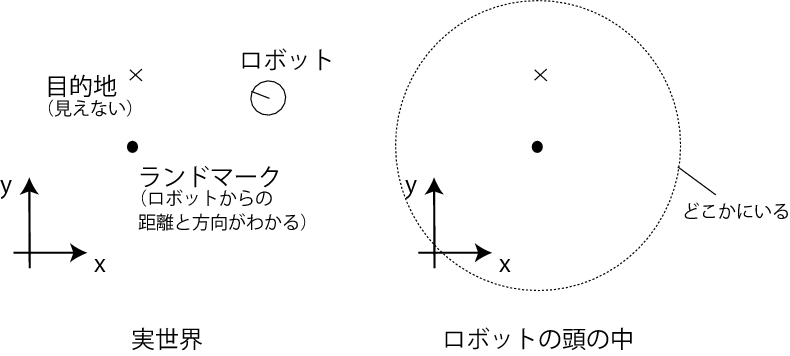
- どこにいるか知りたい
- 正確な地図を知りたい
- 安全で短い経路が知りたい

遭難したらおしまい
By George Grie - 投稿者自身による作品, [1], CC 表示-継承 3.0, https://commons.wikimedia.org/w/index.php?curid=3298445
ナビゲーション技術
- 自己位置推定
- SLAM(simultaneous localization and mapping)
- 目的地までの経路探索
最近(ここ20年)の考え方
- 確率論(ベイズ推論)の導入
- 自身の分かっていること/分かっていないことを 確率分布で表現

- センサが良くなるまでのつなぎ扱いになることも

確率分布の記述
- ガウス分布
- カルマンフィルタ(1960年〜)
- 格子地図
- 状態空間を切って格子一つ一つに確率を記述
- パーティクルフィルタ
- 確率分布から標本抽出した標本の分布で記述
よく使われるアルゴリズム
- こちらが詳しいです
- Monte Carlo Locaization(MCL)
- FastSLAM
- MCLのパーティクルに地図を持たせたもの
- graph-based SLAM
- 精度行列(情報行列)に移動履歴やセンサでの 観測履歴を登録し、後で最も精度行列を操作して ロボットの経路と地図を得る
- visual SLAM
- 画像の重ね合わせ
- 画像どうしの相対姿勢からカメラの経路を推定 (visual odometry)
ROS
- ロボットのためのプロセス間通信の仕組み
- 仕組みも重要だが使いこなすにはオープンソース活動の理解が必須
- GitHubやLinuxのパッケージの利用
- コミュニティーへの貢献
RoboCup@Homeでの利用(参考: インストーラのコード)
自身の研究
- 海馬とナビゲーション
- 情報不足な中での行動決定
海馬とナビゲーション
- 哺乳類の海馬
- 記憶や空間情報を扱う
- 移動ロボットのアルゴリズムとの関連性を調査中
- 海馬モデル検討会@ドワンゴ
.png#/media/File:CajalHippocampus_(modified).png)
By original: Santiago Ramón y Cajal (1852–1934)
derivative = Looie496 - File:CajalHippocampus.jpeg from: Santiago Ramón y Cajal (1911) [1909] Histologie du Système nerveux de l'Homme et des Vertébrés, Paris: A. Maloine, Public Domain, https://commons.wikimedia.org/w/index.php?curid=3908039
{kind=link}
自身の成果
「Particle Filter on Episode」
- Monte Carlo Localizationを記憶(時間軸)の上で実行 →学習アルゴリズムになる
- 記憶を無限に蓄えられたら生物はどんな学習をする? という思考実験から
- 7月に上海で発表
情報不足な中での行動決定
PFC(probabilistic flow control)法
問題
PFCで得られる行動

実機実験(改良中)
対称・ほぼ自己位置推定できない環境でのナビゲーション
本日のまとめ
- 移動ロボットの分野には確率論が流入し続けている
- 機械学習の導入でさらに確率・統計の扱いが重要に
- 移動ロボットを始めるならROS
- 文化的な背景を知るとなじみやすい
- 上田個人の研究
- 応用例を増やしたい
 ノート
Tweet
ノート
Tweet